
Page 182 - IJOCTA-15-1
P. 182
Y. Olmez et al. / IJOCTA, Vol.15, No.1, pp.166-182 (2025)
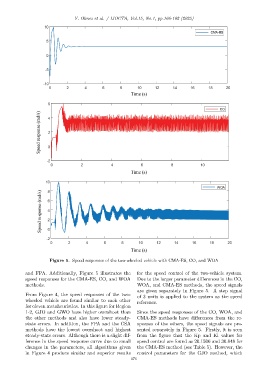
Figure 5. Speed responses of the two-wheeled vehicle with CMA-ES, CO, and WOA
and FPA. Additionally, Figure 5 illustrates the for the speed control of the two-vehicle system.
speed responses for the CMA-ES, CO, and WOA Due to the larger parameter differences in the CO,
methods. WOA, and CMA-ES methods, the speed signals
are given separately in Figure 5. A step signal
From Figure 4, the speed responses of the two-
of 3 units is applied to the system as the speed
wheeled vehicle are found similar to each other
reference.
for eleven metaheuristics. In this figure for Region
1-2, GJO and GWO have higher overshoot than Since the speed responses of the CO, WOA, and
the other methods and also have lower steady- CMA-ES methods have differences from the re-
state errors. In addition, the FPA and the CSA sponses of the others, the speed signals are pre-
methods have the lowest overshoot and highest sented separately in Figure 5. Firstly, it is seen
steady-state errors. Although there is a slight dif- from the figure that the Kp and Ki values for
ference in the speed response curve due to small speed control are found as 20.1506 and 30.848 for
changes in the parameters, all algorithms given the CMA-ES method (see Table 5). However, the
in Figure 4 produce similar and superior results control parameters for the GJO method, which
176