
Page 37 - MSAM-3-3
P. 37
Materials Science in Additive Manufacturing 3D-printed LMPA-integrated soft robots
A
B
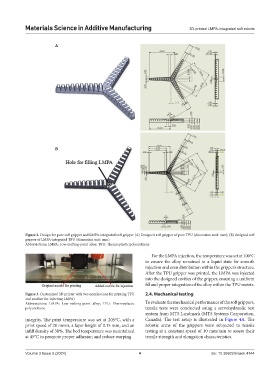
Figure 2. Design for pure soft gripper and LMPA-integrated soft gripper (A) Designed soft gripper of pure TPU (dimension unit: mm); (B) designed soft
gripper of LMPA-integrated TPU (dimension unit: mm)
Abbreviations: LMPA: Low-melting-point alloy; TPU: Thermoplastic polyurethane
For the LMPA injection, the temperature was set at 100°C
to ensure the alloy remained in a liquid state for smooth
injection and even distribution within the gripper’s structure.
After the TPU gripper was printed, the LMPA was injected
into the designed cavities of the gripper, ensuring a uniform
fill and proper integration of the alloy within the TPU matrix.
Figure 3. Customized 3D printer with two nozzles (one for printing TPU 2.4. Mechanical testing
and another for injecting LMPA)
Abbreviations: LMPA: Low-melting-point alloy; TPU: Thermoplastic To evaluate the mechanical performance of the soft grippers,
polyurethane tensile tests were conducted using a servohydraulic test
system from MTS Landmark (MTS Systems Corporation,
integrity. The print temperature was set at 205°C, with a Canada). The test setup is illustrated in Figure 4A. The
print speed of 20 mm/s, a layer height of 0.15 mm, and an robotic arms of the grippers were subjected to tensile
infill density of 30%. The bed temperature was maintained testing at a constant speed of 10 mm/min to assess their
at 45°C to promote proper adhesion and reduce warping. tensile strength and elongation characteristics.
Volume 3 Issue 3 (2024) 4 doi: 10.36922/msam.4144