
Page 9 - IJOCTA-15-2
P. 9
M. Perala, S. Chandrasekaran, E. Begovic / IJOCTA, Vol.15, No.2, pp.202-214 (2025)
developed. 12 The fractional-order active distur- station-keeping in offshore drillships by address-
bance rejection control function improves distur- ing surge, sway, and yaw responses using AI con-
bance estimation and compensation by filtering trol algorithms.
noise while preserving system dynamics, effec-
tively handling nonlinearities and uncertainties.
Additionally, phase prediction enhances stabil-
ity and accuracy by forecasting the system’s fu-
ture state based on past data, which is crucial
for dynamic environments like marine naviga-
tion. An active disturbance rejection control al-
gorithm integrating FAL filtering and phase pre-
diction, demonstrating improved position control
efficiency compared to classical controllers, was
introduced. 13 These studies have motivated fur-
ther research into AI-driven controllers for DPS
to enhance control accuracy and robustness.
The present study explores an innovative con-
trol method to improve a drillship’s surge, sway,
and yaw responses through an AI-based control
algorithm. In contrast to traditional DPS ap-
proaches that rely heavily on model-based and
physical redundancy systems, the proposed AI-
driven solution leverages machine learning tech-
niques to cater to operational demands, offering
enhanced flexibility and performance.
The proposed algorithm is designed to opti-
mize the control of thrusters and propellers, mak-
ing precise adjustments to counteract environ-
mental forces and maintain the vessel’s position
with minimal deviation. The algorithm reduces
dependence on preprogrammed or model-based Figure 1. Conceptual sketch
responses by incorporating intelligent decision-
making into the control system. It enables the
system to deliver superior performance, especially 2. Methodology
in nonlinear and unpredictable conditions, where
traditional controllers face limitations. This study focuses on developing and validating
a numerical model of a drillship to ensure its ac-
With the integration of AI tools, this study curacy, as verified by comparisons with data from
seeks to transform response control by improving existing literature. A dynamic analysis uses this
station-keeping reliability and minimizing down- validated model to create a comprehensive data-
time caused by unwanted motions or environmen- base that forms the foundation for training a novel
tal disturbances. The focus is on developing real-
AI algorithm. This AI algorithm is designed to
time adaptive solutions, making the system re-
enhance the efficiency and precision of the DPS
silient to uncertainties, and efficiently addressing
controller.
the dynamic challenges faced in offshore environ-
ments. The methodology begins with the onboard
sensors continuously monitoring the vessel’s mo-
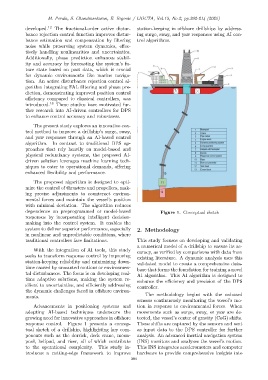
Advancements in positioning systems and tion in response to environmental forces. When
adopting AI-based techniques underscore the movements such as surge, sway, or yaw are de-
growing need for innovative approaches in offshore tected, the vessel’s center of gravity (CoG) shifts.
response control. Figure 1 presents a concep- These shifts are captured by the sensors and sent
tual sketch of a drillship, highlighting key com- as input data to the DPS controller for further
ponents such as the derrick, deck crane, moon- analysis. An advanced inertial navigation system
pool, helipad, and riser, all of which contribute (INS) monitors and analyzes the vessel’s motion.
to the operational complexity. This study in- This INS integrates accelerometers and computer
troduces a cutting-edge framework to improve hardware to provide comprehensive insights into
204