
Page 36 - IJAMD-1-1
P. 36
International Journal of AI
for Material and Design ML for quality improvement in L-PBF
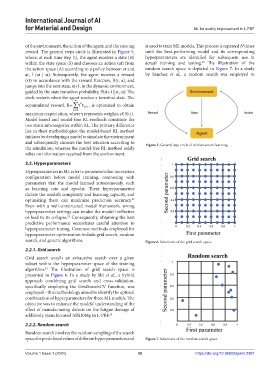
of the environment, the action of the agent, and the ensuing is used to train ML models. This process is repeated N times
reward. The general steps circle is illustrated in Figure 5, until the best-performing model and its corresponding
where, at each time step (t), the agent receives a state (st) hyperparameters are identified for subsequent use in
within the state space (S) and chooses an action (at) from actual training and testing. The illustration of the
26
the action space (A) according to a policy between st and random search space is depicted in Figure 7. In a study
at, f (at | st). Subsequently, the agent receives a reward by Sanchez et al., a random search was employed to
(rt) in accordance with the reward function, R(r, a), and
jumps into the next state, st+1, in the dynamic environment,
guided by the state transition probability, P(st+1 | st, at). The
circle restarts when the agent reaches a terminal state. The
∞
accumulated reward, R= ∑ γ k r + t k , is optimized to obtain
k0
=
maximum expectation, where γ represents weights, γ∈(0,1).
Model-based and model-free RL methods constitute the
two main subcategories within RL. The primary difference
lies in their methodologies: the model-based RL method
initiates by developing a model to simulate the environment
and subsequently chooses the best situation according to Figure 5. General step circle of reinforcement learning.
the simulation, whereas the model-free RL method solely
relies on information received from the environment.
2.2. Hyperparameters
Hyperparameters in ML refer to parameters that necessitate
configuration before model training, contrasting with
parameters that the model learned autonomously, such
as learning rate and epochs. These hyperparameters
dictate the model’s complexity and learning capacity, and
optimizing them can maximize prediction accuracy. 22
Even with a well-constructed model framework, wrong
hyperparameter settings can render the model ineffective
or lead to its collapse. Consequently, obtaining the best
23
predictive performance necessitates careful attention to
hyperparameter tuning. Common methods employed for
hyperparameter optimization include grid search, random
search, and genetic algorithms. Figure 6. Schematic of the grid search space.
2.2.1. Grid search
Grid search entails an exhaustive search over a given
subset within the hyperparameter space of the training
algorithm. The illustration of grid search space is
24
presented in Figure 6. In a study by Shi et al., a hybrid
approach combining grid search and cross-validation,
specifically employing the GridSearchCV function, was
employed – this methodology aimed to identify the optimal
combination of hyperparameters for three ML models. The
objective was to enhance the models’ understanding of the
effect of manufacturing defects on the fatigue damage of
additively manufactured AlSi10Mg in L-PBF. 25
2.2.2. Random search
Random search involves the random sampling of the search
space for predefined values of different hyperparameters and Figure 7. Schematic of the random search space.
Volume 1 Issue 1 (2024) 30 https://doi.org/10.36922/ijamd.2301