
Page 170 - IJOCTA-15-2
P. 170
A modified graphical based tuning and performance analysis of second order LADRC . . .
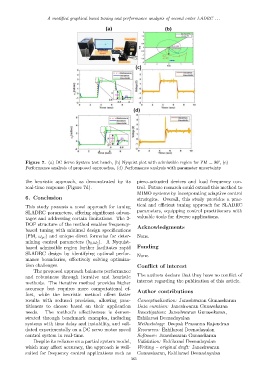
Figure 7. (a) DC Servo System test bench, (b) Nyquist plot with admissible region for PM = 90°, (c)
Performance analysis of proposed approaches, (d) Performance analysis with parameter uncertainty
the heuristic approach, as demonstrated by its piezo-actuated devices and load frequency con-
real-time response (Figure 7d). trol. Future research could extend this method to
MIMO systems by incorporating adaptive control
6. Conclusion strategies. Overall, this study provides a prac-
tical and efficient tuning approach for SLADRC
This study presents a novel approach for tuning
parameters, equipping control practitioners with
SLADRC parameters, offering significant advan-
valuable tools for diverse applications.
tages and addressing certain limitations. The 2-
DOF structure of the method enables frequency-
Acknowledgments
based tuning with minimal design specifications
(PM, ω gc ) and unique direct formulas for deter- None.
mining control parameters (b 0 ,ω c ). A Nyquist-
based admissible region further facilitates rapid Funding
SLADRC design by identifying optimal perfor-
None.
mance boundaries, effectively solving optimiza-
tion challenges. Conflict of interest
The proposed approach balances performance
and robustness through iterative and heuristic The authors declare that they have no conflict of
methods. The iterative method provides higher interest regarding the publication of this article.
accuracy but requires more computational ef- Author contributions
fort, while the heuristic method offers faster
results with reduced precision, allowing prac- Conceptualization: Janeshwaran Gunasekaran
titioners to choose based on their application Data curation: Janeshwaran Gunasekaran
needs. The method’s effectiveness is demon- Investigation: Janeshwaran Gunasekaran,
strated through benchmark examples, including Ezhilarasi Deenadayalan
systems with time delay and instability, and vali- Methodology: Deepak Prasanna Rajendran
dated experimentally on a DC servo motor speed Resources: Ezhilarasi Deenadayalan
control system in real-time. Software: Janeshwaran Gunasekaran
Despite its reliance on a partial system model, Validation: Ezhilarasi Deenadayalan
which may affect accuracy, the approach is well- Writing – original draft: Janeshwaran
suited for frequency control applications such as Gunasekaran, Ezhilarasi Deenadayalan
365