
Page 15 - IJOCTA-15-4
P. 15
Control strategies and power converter topologies for switched reluctance motors in electric...
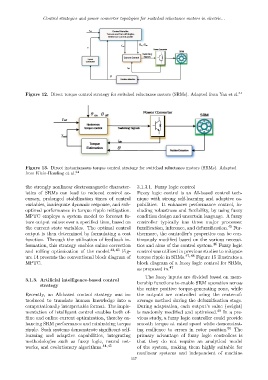
Figure 12. Direct torque control strategy for switched reluctance motors (SRMs). Adapted from Yan et al. 31
Figure 13. Direct instantaneous torque control strategy for switched reluctance motors (SRMs). Adapted
from Klein-Hessling et al. 34
the strongly nonlinear electromagnetic character- 3.1.3.1. Fuzzy logic control
istics of SRMs can lead to reduced control ac- Fuzzy logic control is an AI-based control tech-
curacy, prolonged stabilization times of control nique with strong self-learning and adaptive ca-
variables, inadequate dynamic response, and sub- pabilities. It enhances performance control, in-
optimal performance in torque ripple mitigation. cluding robustness and flexibility, by using fuzzy
MPTC employs a system model to forecast fu- condition design and uncertain language. A fuzzy
ture output values over a specified time, based on controller typically has three major processes:
the current state variables. The optimal control fuzzification, inference, and defuzzification. 45 Fur-
output is then determined by formulating a cost thermore, the controller’s properties can be con-
function. Through the utilization of feedback in- tinuously modified based on the various necessi-
formation, this strategy enables online correction ties and aims of the control system. 46 Fuzzy logic
and rolling optimization of the model. 42,43 Fig- control was utilized in previous studies to mitigate
ure 14 presents the conventional block diagram of torque ripple in SRMs. 47,48 Figure 15 illustrates a
MPTC. block diagram of a fuzzy logic control for SRMs,
as proposed in. 47
The fuzzy inputs are divided based on mem-
3.1.3. Artificial intelligence-based control bership functions to enable SRM operation across
strategy
the entire positive torque-generating zone, while
Recently, an AI-based control strategy was in- the outputs are controlled using the center-of-
troduced to translate human knowledge into a average method during the defuzzification stage.
computationally interpretable format. The imple- During adaptation, each output’s value (weight)
mentation of intelligent control enables both of- is randomly modified and optimized. 49 In a pre-
fline and online current optimization, thereby en- vious study, a fuzzy logic controller could provide
hancing SRM performance and minimizing torque smooth torque at rated speed while demonstrat-
ripple. Such systems demonstrate significant self- ing resilience to errors in rotor position. 50 The
learning and adaptive capabilities, integrating primary advantage of fuzzy logic controllers is
methodologies such as fuzzy logic, neural net- that they do not require an analytical model
works, and evolutionary algorithms. 44,45 of the system, making them highly suitable for
nonlinear systems and independent of machine
557