
Page 16 - IJOCTA-15-4
P. 16
M. A. Aman et al. / IJOCTA, Vol.15, No.4, pp.549-577 (2025)
Figure 14. Model predictive torque control strategy for switched reluctance motors (SRMs). Adapted from
Ge et al. 42
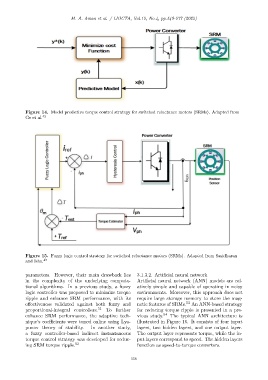
Figure 15. Fuzzy logic control strategy for switched reluctance motors (SRMs). Adapted from Sasidharan
and Isha. 47
parameters. However, their main drawback lies 3.1.3.2. Artificial neural network
in the complexity of the underlying computa- Artificial neural network (ANN) models are rel-
tional algorithms. In a previous study, a fuzzy atively simple and capable of operating in noisy
logic controller was proposed to minimize torque environments. Moreover, this approach does not
ripple and enhance SRM performance, with its require large storage memory to store the mag-
effectiveness validated against both fuzzy and netic features of SRMs. 53 An ANN-based strategy
proportional-integral controllers. 51 To further for reducing torque ripple is presented in a pre-
enhance SRM performance, the adaptive tech- vious study. 54 The typical ANN architecture is
nique’s coefficients were tuned online using Lya- illustrated in Figure 16. It consists of four input
punov theory of stability. In another study, layers, two hidden layers, and one output layer.
a fuzzy controller-based indirect instantaneous The output layer represents torque, while the in-
torque control strategy was developed for reduc- put layers correspond to speed. The hidden layers
ing SRM torque ripple. 52 function as speed-to-torque converters.
558