
Page 13 - IJOCTA-15-4
P. 13
Control strategies and power converter topologies for switched reluctance motors in electric...
Figure 8. Average torque control strategy for switched reluctance motors (SRMs). Adapted from Wang et
al. 21
Figure 9. Open-loop current sharing control strategy for switched reluctance motors (SRMs). Adapted from
Fang et al. 16
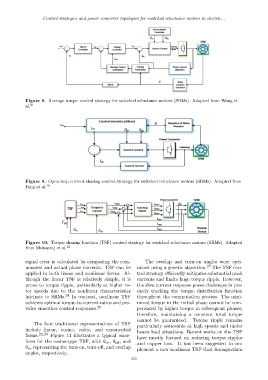
Figure 10. Torque sharing function (TSF) control strategy for switched reluctance motors (SRMs). Adapted
from Mohanraj et al. 23
signal error is calculated by comparing the com- The overlap and turn-on angles were opti-
manded and actual phase currents. TSF can be mized using a genetic algorithm. 23 The TSF con-
applied in both linear and nonlinear forms. Al- trol strategy efficiently mitigates substantial peak
though the linear TSF is relatively simple, it is currents and limits huge torque ripple. However,
prone to torque ripple, particularly at higher ro- the slow current response poses challenges in pre-
tor speeds due to the nonlinear characteristics cisely tracking the torque distribution function
intrinsic to SRMs. 24 In contrast, nonlinear TSF throughout the commutation process. The mini-
achieves optimal torque-to-current ratios and pro- mized torque in the initial phase cannot be com-
vides smoother control responses. 25 pensated by higher torque in subsequent phases;
therefore, maintaining a constant total torque
cannot be guaranteed. Torque ripple remains
The four traditional representations of TSF
particularly noticeable at high speeds and under
include linear, cosine, cubic, and exponential heavy load situations. Recent works on the TSF
forms. 22,26 Figure 11 illustrates a typical wave-
have mostly focused on reducing torque ripples
form for the cosine-type TSF, with θ on , θ off , and
and copper loss. It has been suggested to im-
θ ov representing the turn-on, turn-off, and overlap
plement a new nonlinear TSF that demagnetizes
angles, respectively.
555