
Page 90 - IJOCTA-15-4
P. 90
Viet Thanh et al. / IJOCTA, Vol.15, No.4, pp.625-648 (2025)
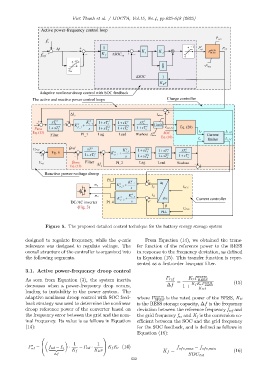
Figure 5. The proposed detailed control technique for the battery energy storage system
designed to regulate frequency, while the q-axis From Equation (14), we obtained the trans-
reference was designed to regulate voltage. The fer function of the reference power to the BESS
overall structure of the controller is organized into in response to the frequency deviation, as defined
the following segments. in Equation (15). This transfer function is repre-
sented as a first-order low-pass filter.
3.1. Active power-frequency droop control
norm
As seen from Equation (3), the system inertia P ref = K r P BESS (15)
norm
decreases when a power-frequency drop occurs, ∆f 1 + K f K r P BESS
K E s
leading to instability in the power system. The
adaptive nonlinear droop control with SOC feed- where P norm is the rated power of the BESS, K E
BESS
back strategy was used to determine the nonlinear is the BESS storage capacity, ∆f is the frequency
droop reference power of the converter based on deviation between the reference frequency f ref and
the frequency error between the grid and the nom- the grid frequency f s , and K f is the conversion co-
inal frequency. Its value is as follows in Equation efficient between the SOC and the grid frequency
(14): for the SOC feedback, and is defined as follows in
Equation (16):
1
∗
P · − P ref · 1
K f K r (14)
ref = f ref − f s f ofs,max − f ofs,min
K f K E s K f = (16)
| {z }
∆f SOC tot
632